
Why I Built This
I love tinkering, and the idea of using off-the-shelf hobbyist BLDC motors for a motion simulator was too good to pass up. I picked up some second-hand motors and ODrives from a like-minded sim racer, and got to work figuring out how to make it all talk to SimHub.
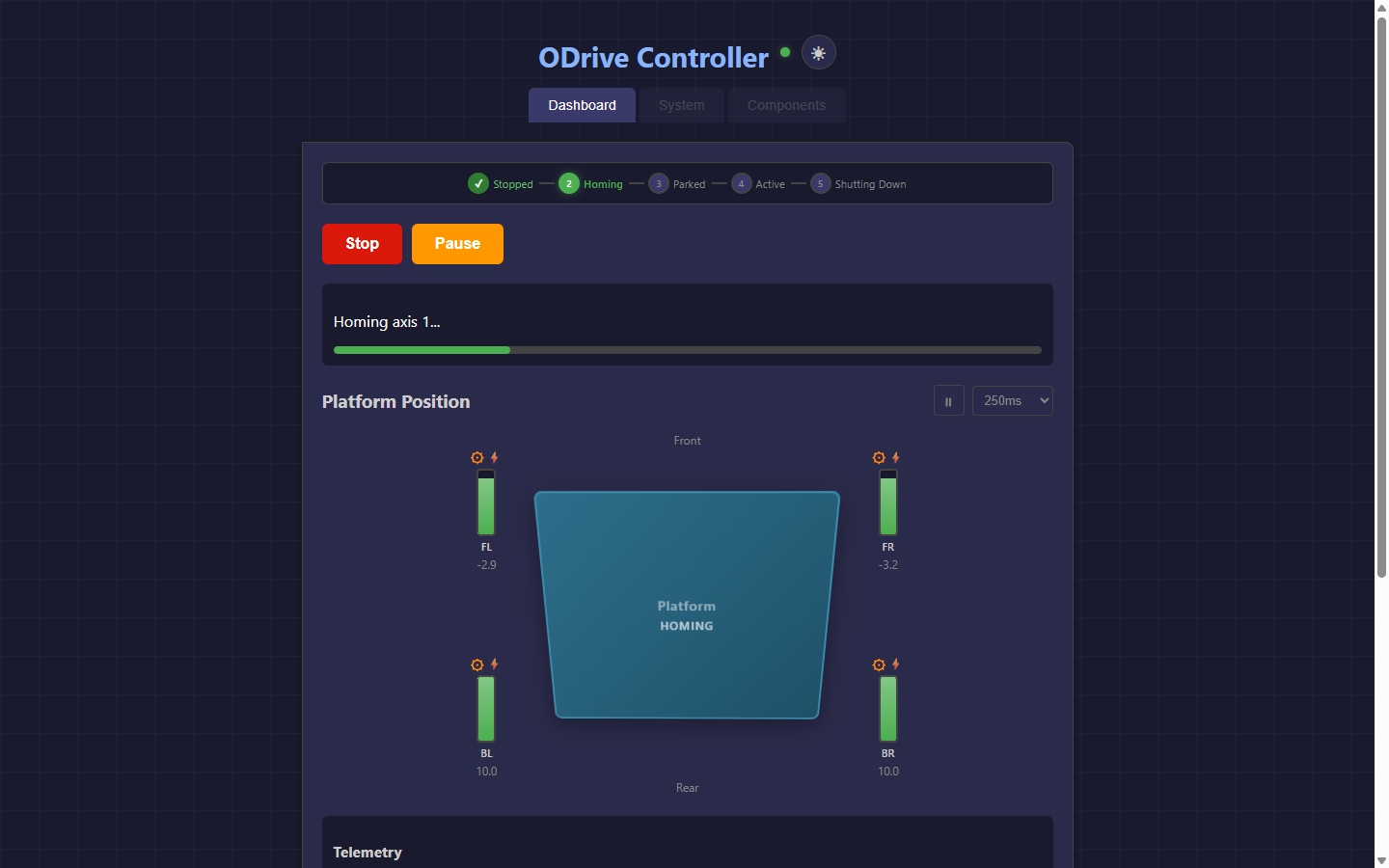
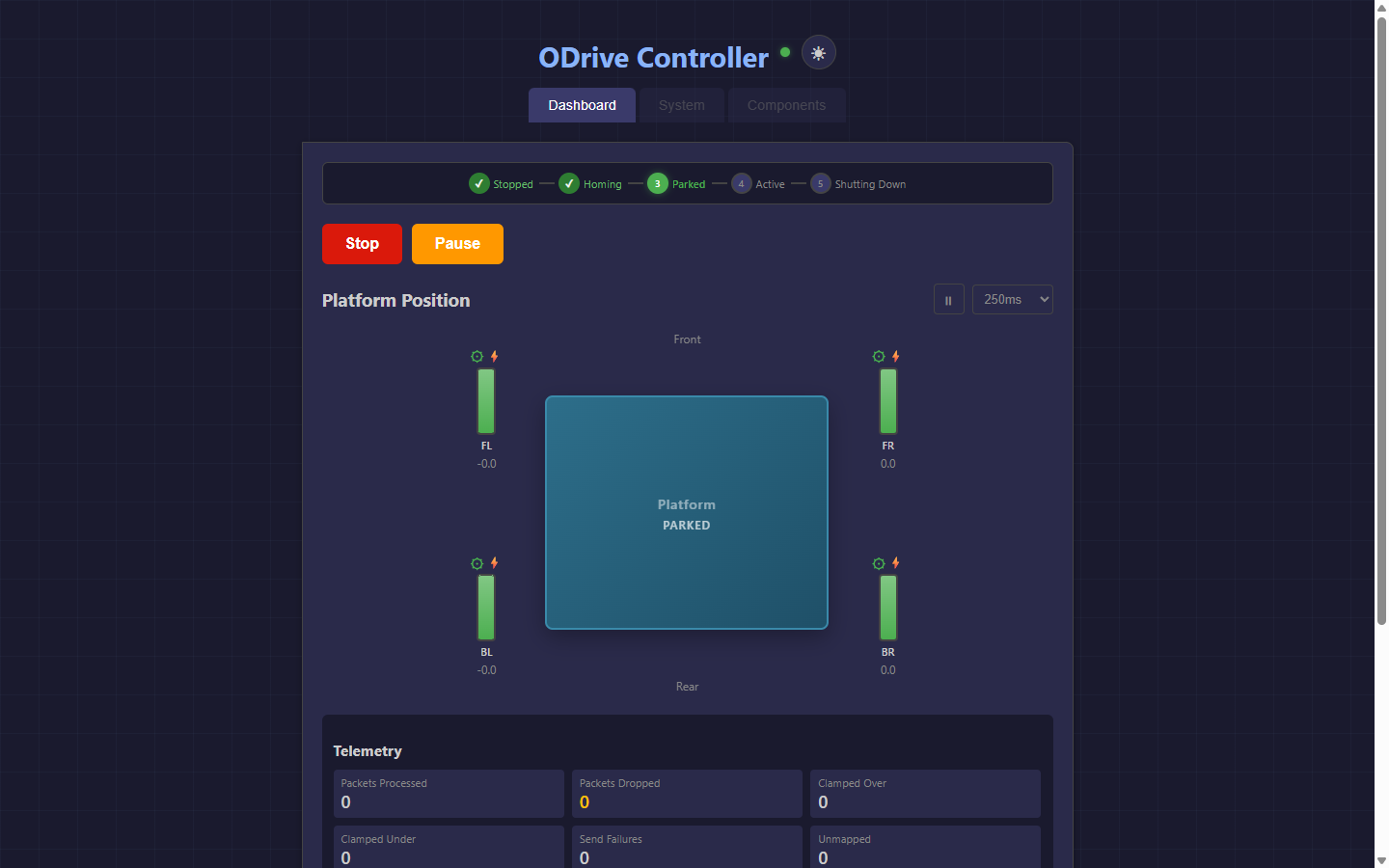
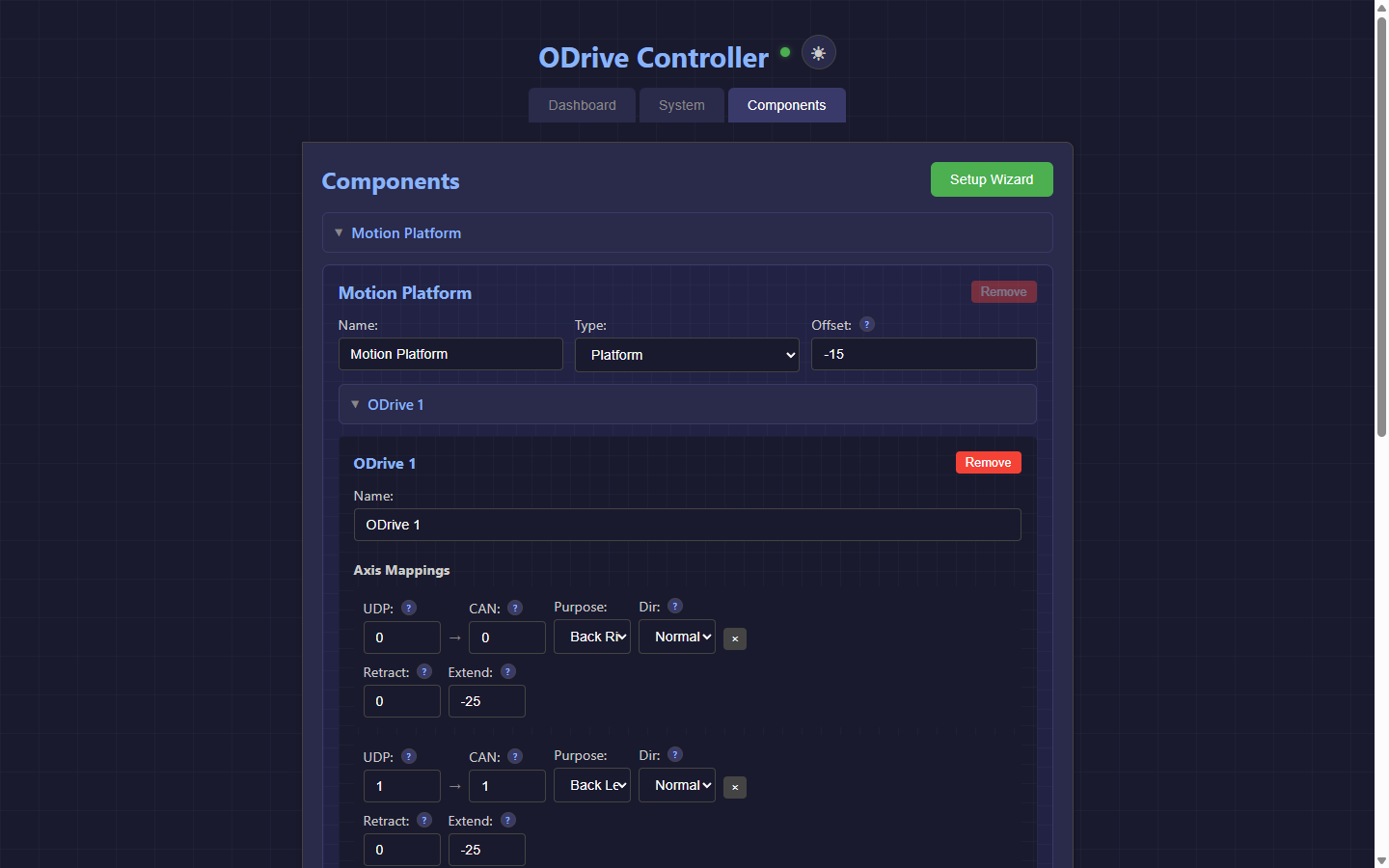
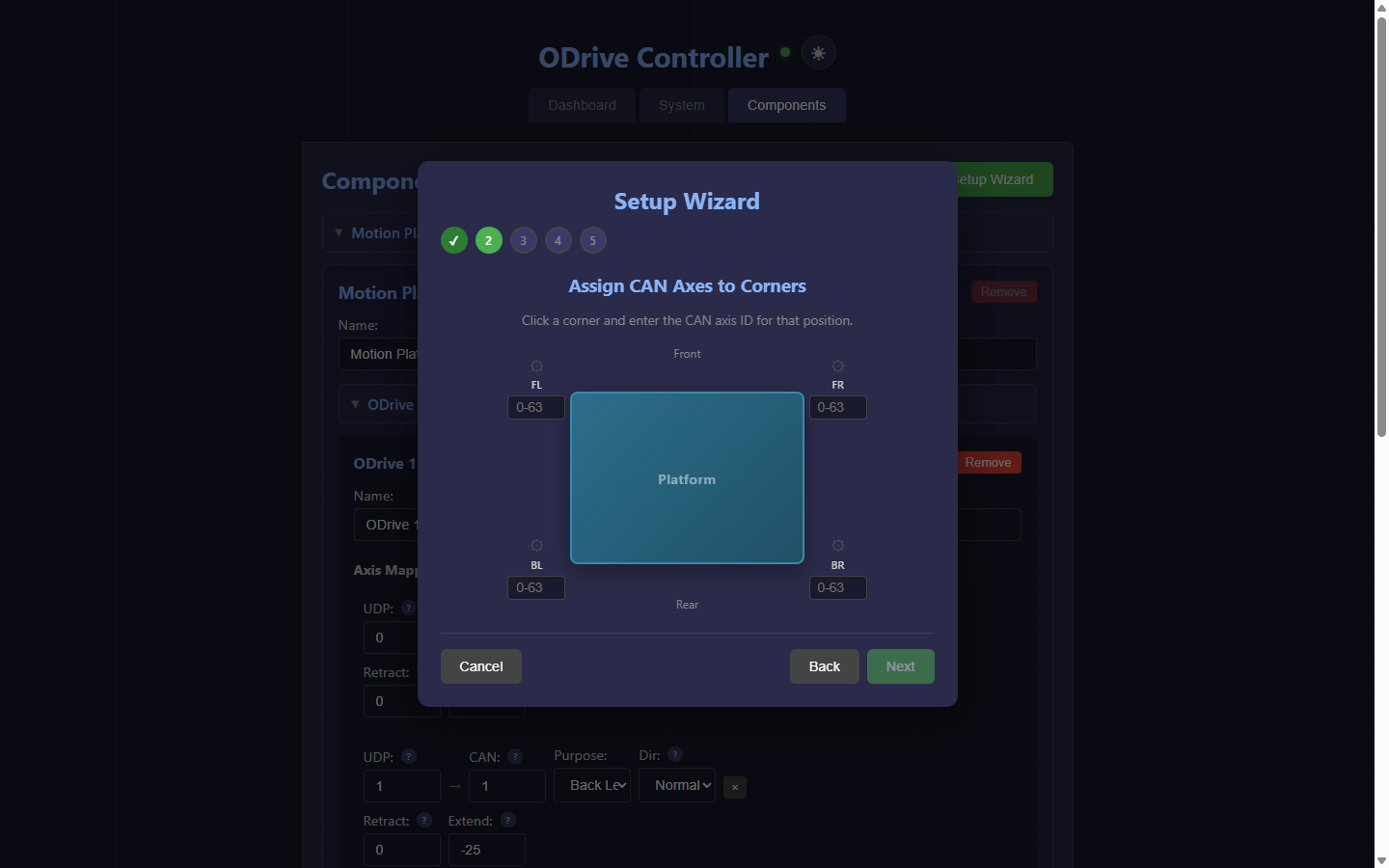
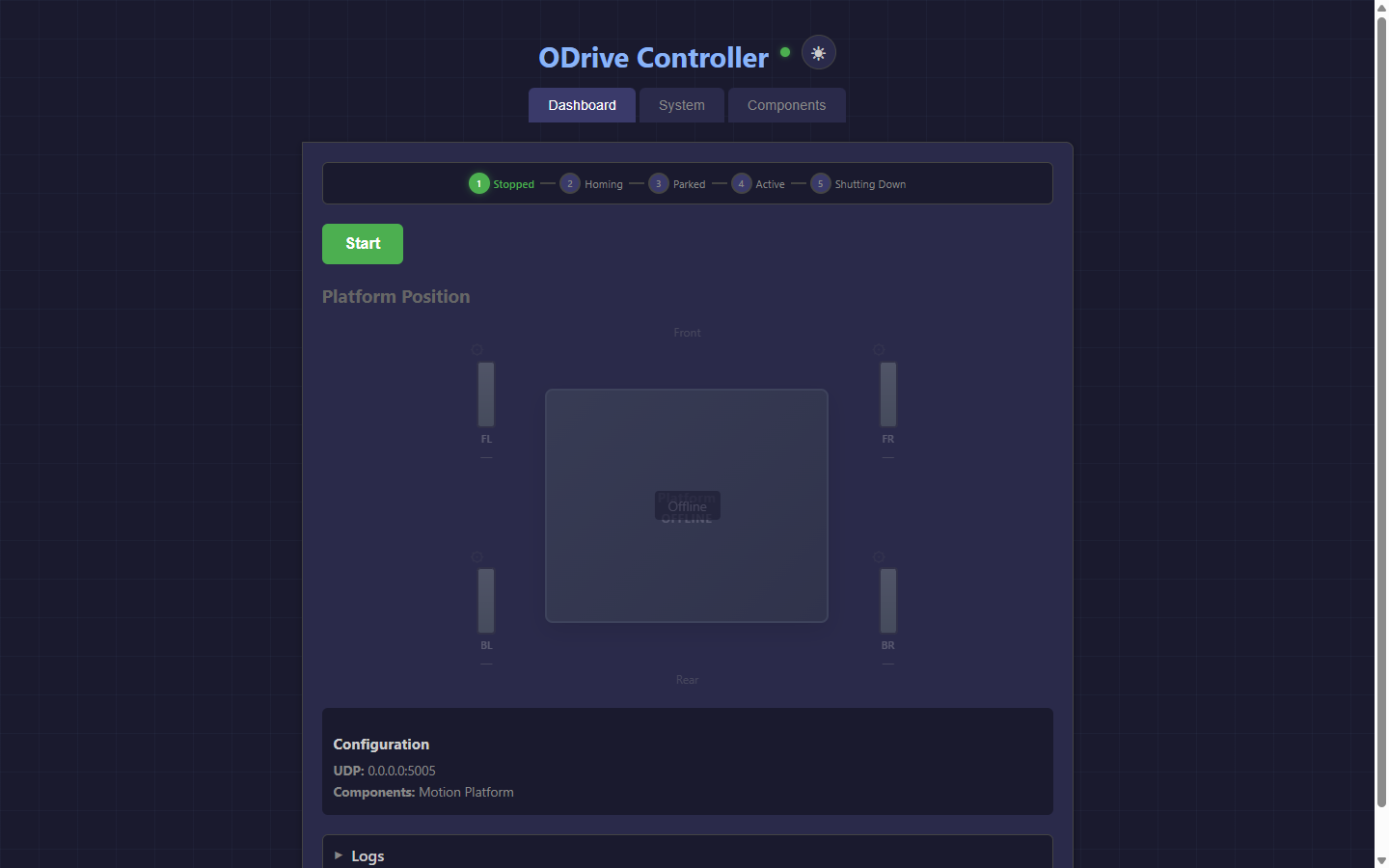
What I quickly found was a gap — there was nothing like the polished controller software that exists for servo and AC systems. No homing, no web interface, no plug-and-play setup. Just raw CAN commands and a lot of trial and error.
So I built it. What started as a weekend project has turned into something I want to share with the community. If you're running ODrives on a motion rig and wish the software side was easier — this is for you.